NOTIZIE SULL'IMMERSIONE
Ora i robot oceanici volano da soli

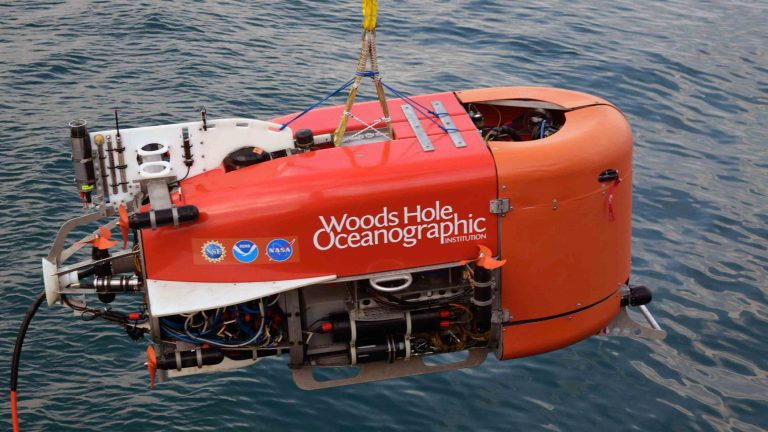
Immagine: Evan Lubofsky, Istituto oceanografico di Woods Hole.
Il primo caso noto di un robot sottomarino che preleva autonomamente un campione di sedimenti si è verificato su Kolumbo, un vulcano attivo a 500 metri di profondità al largo dell’isola greca di Santorini, nell’Egeo.
Il braccio robotico che ha prelevato il campione per un team internazionale di ricercatori è stato montato su un veicolo ibrido telecomandato chiamato Nereid Under Ice (NUI), sviluppato dalla Woods Hole Oceanographic Institution (WHOI) del Massachusetts.
"Per un veicolo prelevare un campione senza un pilota alla guida è stato un enorme passo avanti", ha affermato lo scienziato dell'OMS Rich Camilli. "Uno dei nostri obiettivi era eliminare il joystick e siamo riusciti a farlo."
I ricercatori stavano studiando l’ambiente “aspro e carico di sostanze chimiche” di Kolumbo e le sue forme di vita microbica, esplorando anche la misura in cui i robot oceanici potrebbero esplorare senza l’intervento umano.
La NUI delle dimensioni di un'auto intelligente utilizza un software di pianificazione automatizzata basato sull'intelligenza artificiale, incluso un pianificatore chiamato Spock.
Ciò gli ha permesso di decidere quali siti vulcanici visitare e di prelevare autonomamente i campioni, aspirandoli attraverso un “tubo slurp-sample”.
Secondo lo scienziato dell’Università del Michigan Gideon Billings, il cui codice è stato utilizzato per raccogliere il primo campione, tale automazione consentirà alla NASA di esplorare mondi oceanici oltre il nostro sistema solare.
"Se abbiamo questa grande visione di inviare robot in luoghi come Europa ed Encelado [rispettivamente le lune di Giove e Saturno], alla fine dovranno lavorare in modo indipendente in questo modo e senza l'assistenza di un pilota", ha detto.
11 Gennaio 2020
La ricerca futura, che coinvolgerà anche l’Australian Center for Field Robotics, il Massachusetts Institute of Technology e il Toyota Technological Institute di Chicago, includerà formazione robot oceanici da vedere come piloti ROV, utilizzando la tecnologia di “tracciamento dello sguardo” e costruendo un’interfaccia in linguaggio umano per consentire agli scienziati di rivolgersi ai robot direttamente, anziché tramite un pilota.
“Possiamo finalmente vedere una rete di robot cognitivi oceanici in cui esiste un’intelligenza condivisa che abbraccia un’intera flotta, con ciascun veicolo che lavora in modo cooperativo come le api in un alveare”, ha affermato Camilli. “Andrà ben oltre la perdita del joystick.”
Il progetto è stato finanziato dalla NASA e dalla National Science Foundation National Robotics Initiative.

